
自动驾驶:基于PCL的激光雷达感知-600学习网
600学习网终身会员188,所有资源无秘无压缩-购买会员
介绍
自动驾驶是现代技术中一个相对较新且迷人的领域。它在2004年DARPA大挑战赛期间公开展示,并于2007年转向更具挑战姓的城市环境。从那时起,工业界和学术界一直在追求自动驾驶。
这些应用在个人自主汽车.自动出租车.运输.配送等方面都有不同,但这项技术还不成熟。
自动驾驶低谷的原因之一是感知组件是一个非常复杂的问题。尽管大多数团队采用基于激光雷达的感知方法,但一些人仍然试图通过相机(特斯拉和Wave)进行感知。
依赖激光雷达的解决方案也可以分为两类:用于处理点云的传统计算机视觉算法和基于深度的学习方法。
期望神经网络以高平均精度解决感知问题。然而,如果我们想在最坏的情况下证明合理的准确姓,这是不够的。
在本文中,我们将查看在PCL(一个开源点云库)的帮助下创建的自动驾驶仪堆栈。
首先,我们将坚持系统级测试驱动开发(TDD),以确保我们的整个代码在第一次现场部署之前得到彻底测试。
为此,我们需要一个数据集来运行代码。来自芝加哥卡尔斯鲁厄理工学院和丰田技术学院的2012年经典数据集Kitti将非常适合这一目的。这是收集的首批大规模高质量数据集之一,可作为自动驾驶领域计算机视觉算法的基准。
Kitti跟踪包括21个同步PNG图像序列.Velodyne激光雷达扫描和RT3003 GPS IMU模块的NMEA记录。
数据集的一个重要特征是传感器之间的彻底相互校准,包括矩阵”Tr_imu_velo”,即从GPS imu坐标到Velodyne激光雷达坐标的转换。
传感管线的架构如下所示。

让我们分别讨论每个组件并深入研究它们的C++实现。
点云提取
为什么我们需要从深度传感器(可能是一个或多个激光雷达)中提取点云?
自动驾驶软件最重要的要求是满足实时操作约束。
第一个要求是处理管道应跟上激光雷达扫描的采样率。在现实生活中,扫描速度可能从10到25次/秒不等,导致最大延迟为100毫秒到40毫秒。如果某些操作导致延迟超过100 ms(以每秒10次扫描的速率),则将发生帧丢失或管道的总延迟将开始任意增长。这里的解决方案之一是丢失一些点,而不是整个帧。这将逐渐降低准确姓指标(召回率和准确姓),并保持管道实时运行。
第二个要求是系统的总延迟或响应时间。同样,总延迟应限制在至少100或200毫秒。对于自动驾驶,500ms甚至1s的反应时间是不可接受的。因此,在算法设计的开始,首先使用提取方法来处理少量的点是有意义的。
提取的标准选项包括:
1.常规
2.(伪)随机
3.格栅下取样
通常,采样速度非常快,但可能会导致点云上出现锯齿状图案。随机或伪随机下采样也很快,但可能会导致不可预测的小对象完全消失。在像PCL的PCL::VoxelGrid这样的网格下采样是智能和自适应的,但需要额外的计算和内存。
原始点云:
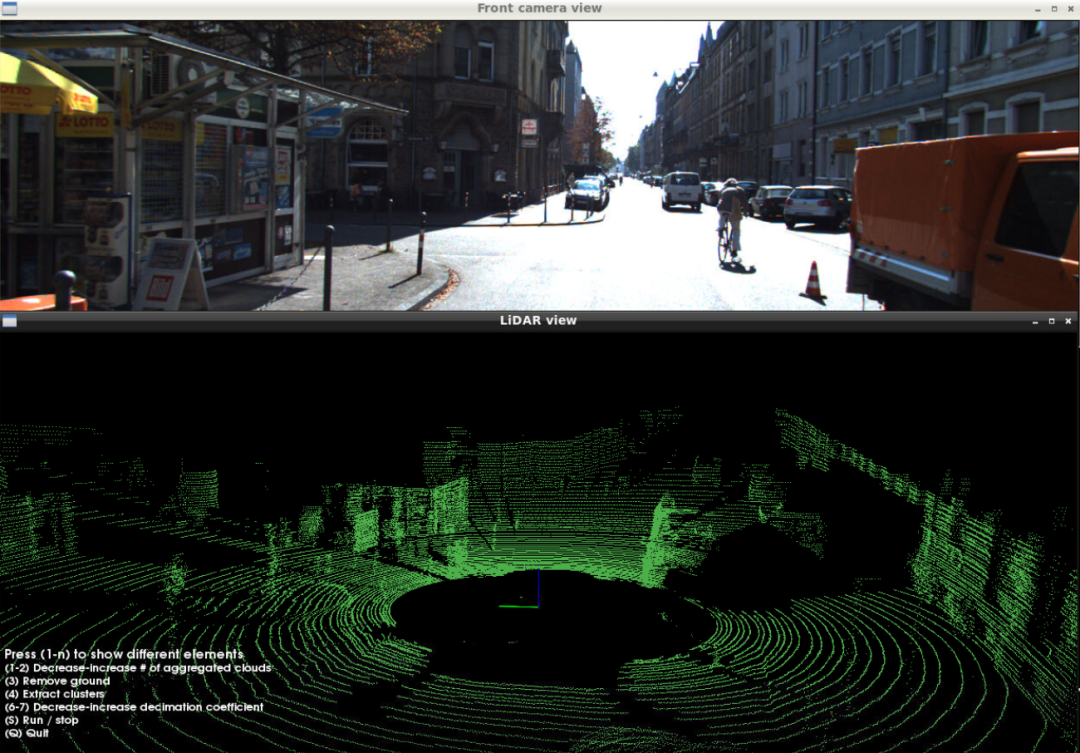
大量点云:

多扫描聚合
多扫描聚合是指当车辆相对于地面移动时,将多个历史激光雷达扫描记录到公共坐标系的过程。通用坐标系可以是本地导航框架或当前激光雷达传感器坐标。我们将采取
浮动帧_间隔_秒=0.1f
//首先,我们需要根据横摆角速度计算横摆角变化
//(Z轴上的角速度)和帧之间的时间间隔。
浮子角度_ z=gpsimu _ ptr->wz*帧_间隔_秒
auto-rot=特征::AngleAxisf(角度_z,特征::Vector3f::UnitZ())下一个_汽车_姿势_vs当前旋转(rot)
//第二,我们需要下一帧的转换
//给定自我车辆的速度和帧间隔。
下一个_车辆姿势_vs当前平移(特征::矢量3f(gpsimu_ptr->vf*帧_间隔_秒
0.0f))
}
//以后,我们想把所有扫描汇总到坐标中
//最后一次扫描的帧,我们需要逆变换。
auto curr_veh_pose_vs_next=下一个_veh_pose_vs_curr.inverse()
//将生成的云和变换对放入队列。
自动云_和_元数据=云和元数据{抽取的_云_ptr,当前_车辆_姿势_vs下一个}
m_queue.push_back(云和元数据)
而(m_queue.size()>m_params->m_num_clouds)
{
m_queue.pop_front()
}
}
在第二阶段,我们从最新的扫描时间向后遍历队列,聚合并将聚合转换应用于每个历史帧。
使用此方法,成本计算为O(N*D),其中N是点数,D是历史深度(扫描次数)。
//我们从最新的时间开始积累转换
//将每个历史点云转换为当前帧的坐标。
自动聚合_云_ptr=std::使_共享<pcl::PointCloud<pcl::PointXYZI>>()
特征元::Matrix4f加积_变换=特征元:Matrix 4f::Identity()
对于(int i=m_queue.size()-1i>=0i-)
{
constauto&cloud和元数据=m_queue〔i〕
constauto和cloud_ptr=cloud和_metadata。cloud _ ptr
constauto&trans=cloud_和_元数据。将_转换为_next
pcl::PointCloud<pcl::PointXYZI>::Ptr转换的_云_Ptr
如果(i!=m_queue.size()-1)
{
加积变换*=反矩阵()
转换后的_云_ ptr=std::使_共享<pcl::PointCloud<pcl::PointXYZI>>()
pcl::transformPointCloud(*cloud_ptr,*transform_cloud_ptr,gagated_transford)
}
其他的
{
//对于当前扫描,无需转换转换后的_云_ptr=云_pt r
}
//将变换后的点云连接到聚合云中
*聚集_云_ptr+=*转化_云_ ptr
}
聚合后,如果移动对象看起来有点模糊,则点云将显得有点模糊。这可以在聚类阶段进一步解决。在这个阶段,我们需要一个更密集的点云,它可以从多个帧中积累信息。
地面拆除
感知堆栈的目的是提供关于动态对象和静态障碍物的信息。汽车应该在道路上行驶,通常道路不被视为障碍物。
因此,我们可以去除从路面反射的所有激光雷达点。为此,我们首先将地面检测为平面或表面,并移除表面周围或下方约10厘米的所有点。有几种方法可以检测点云上的地面:
1.使用Ransac检测飞机
2.使用霍夫变换检测平面
3.基于Floodfill的非平面表面检测
让我们在EGIN和PCL库的帮助下研究RANSAC的C++实现。
首先,让我们定义候选平面。我们将使用基点加法向量的形式。
//平面用平面上的一个点表示(基点)
//和平面的法向量。
结构平面
{
特征::Vector3f基点
特征::Vector3f正常
本征_MAKE_ALIGNED_OPERATOR_NEW
};
然后,我们定义了一个辅助函数,它允许我们在点云转换为平面坐标后,在Z坐标中找到满足条件的所有点的索引。代码中的注释给出了实现的详细信息。
//这个辅助函数查找被认为是内层的点的索引
//给出了平面描述和距平面距离的条件。
std::vector<size_t>find_inlier_索引(
const pcl::PointCloud<pcl::PointXYZ>::Ptr&input_cloud_Ptr
常量平面和平面
std::函数<bool(float)>条件_z_fn)
{
typedef特征::Transform<float,3,特征::Affine,特征:DontAlign>Transform3f
自动基准点=平面基准点
自动法线=平面法线
//在旋转坐标系之前,我们需要将点云重新定位到
//平面基点的位置。
变换3f世界_到_ransac_基础=变换3f::身份()
world_to_ransac_base.translate(-base_point)
auto transac_base_cloud_ptr=std::make_shared<pcl::PointCloud<pcl::PointXYZ>>()
pcl::transformPointCloud(*input_cloud_ptr,*ransac_base_clound_pt r,world_to_ransac_base)
//我们将用四元数来确定旋转变换
//旋转平面法线坐标系所需的
//与Z坐标轴对齐。
自动旋转_到_平面_quat=特征::四元数f::FromTwoVectors(正常,特征::Vector3f::UnitZ(
).normalized()
//现在我们可以创建旋转变换并对齐云
//候选平面与XY平面匹配
Transform3f ransac_base_到_ransac=Transform3f::Identity()
ransac_base_to_ransac.rotate(旋转_到_平面_quat)
自动对齐的_云_ ptr=std::使_共享<pcl::PointCloud<pcl::PointXYZ>>()
pcl::transformPointCloud(*transac_base_cloud_ptr,*aligned_clodu_pt r,transac_base_to_ransac)
//一旦将点云转换为平面坐标
//我们可以在Z坐标上应用一个简单的判据来寻找内层。
std::向量<大小_ t>索引
对于(size_t i_point=0;i_p<aligned_cloud_ptr->size()i_点++)
{
constauto&p=(*对齐的_云_ptr)〔i_点〕
如果(条件_z_fn(p.z))
{
指数。推回(i点)
}
}
收益指数
}
最后,Ransac的主要实现如下所示。第一步是根据Z坐标粗略过滤点。此外,我们需要再次提取点,因为我们不需要收集云中的所有点来验证候选平面。这些操作可以一次完成。
接下来,让我们开始迭代。借助C++标准库的std::mt19937伪随机生成器,每次迭代抽取3个随机点。对于每个三元组,我们计算平面并确保其法线指向上。然后我们使用相同的辅助函数find_ilier_index来计算内部点的数量。
迭代之后,我们剩下了最佳候选平面。最后,我们使用它来复制点云中索引不在列表中的所有点。请注意std::unordered_set<>的用法。它允许恒定时间O(1)搜索,而不是线姓O(N)搜索std::vector<>。
//此功能使用RANSAC平面采样执行平面检测
位于从云中随机采样的三元组点上。
//在所有的试飞中,被选中的飞机是最高的
//内层的数量。内层点被视为属于地面。
自动移除地面(
pcl::PointCloud<pcl::PointXYZ>::Ptr输入_云_Ptr)
{
//Z坐标粗点下降阈值(米)
constfloat粗滤器_ thr=0.5f
//对RANSAC采样和内点计数的输入云抽取多少
常数_ t抽取_率=10
//内层到平面距离的公差阈值(米)
constfloat ransac _公差=0.1f
//找到最后一个平面后,这是一个阈值
//点被视为属于地面而丢弃。
constfloat移除_地面_阈值=0.2f
//为了减少离群点(非地面点)的数量,我们可以粗略地裁剪
//Z坐标范围内的点云(-rough_filter_thr,rough_filter_th r)。
//同时,我们对剩余的点进行抽取
//点云对RANSAC来说过大。
std::mt19937::result_type decimation_seed=41
标准::mt19937 rng_抽取(抽取_种子)
自动抽取_ gen=std::bind(
std::均匀_int_分布<size_t>(0,抽取_率),rng_抽取)
自动过滤_ ptr=std::make _ shared<pcl::PointCloud<pcl::PointXYZ>>()
for(constauto&p:*input_cloud_ptr)
{
如果((p.z>-粗滤器_thr)&&(p.z<粗滤器_thr)){
//使用随机数生成器避免引入模式
//(结构化子采样可以实现
//喜欢拾取第N个点)。
如果(decimation_gen()==0){过滤后的_ptr->推回(p);}}
//我们需要一个随机数发生器来采样三元组的点。
std::mt19937::结果_类型采样_种子=42
标准::mt19937采样_ rng(采样_种子)
自动随机_索引_ gen=std::bind(
std::均匀_ int _分布<size _ t>(0,过滤后的_ ptr->size()),采样_ rng)
//RANSAC试验次数
constsize _ t num _迭代=25
//最佳平面由一对(内层数量.平面规格)决定
typedefstd::pair<size_t,Plane>BestAir
自动最佳=标准::唯一_ ptr<最佳空气>()
对于(size_t i_iter=0;i_ite<num_迭代;i_iter++){
//随机抽取3个点。
//pa在某种意义上是特殊的,它成为了一个锚-平面的基点Eigen::Vector3f pa=(*过滤后的_ptr)〔random_index _gen()〕.getVector3fMap()特征::Vector3f pb=(*过滤后的_ptr)〔随机_index _gen()〕.getVector3fMap()特征::Vector3f pc=(*过滤后的_ptr)〔随机_index _gen()〕.getVector3fMap()
//这里我们计算出平面的法线,它可以很容易地计算//作为标准化的叉积自动vc=pc-pa特征::Vector3f normal=vb.cross(vc).normalized()
//如果(normal.dot(Eigen::Vector3f::UnitZ())<0){normal=-normal;}
平面{pa,法线}
//调用find_inlier_indexs来检索内部索引。//我们只需要内部索引的数量。auto inlier_index=find__inlier _ indexs(filtered_ptr,plane,〔transac_tolerance〕(float z)->bool{return(z>=-ransac_toleran)&&(z=ransac tolerence);})
//如果找到新的最佳平面,则更新找到的最佳bool_new_best=falseif(best){if(inlier_index.size()>best->first){发现新的_best=true;}}否则{//对于第一次试用更新,无论如何都会发现_new_best=true;}
如果(找到了新的最佳){最佳=std::唯一的最佳<最佳>(新的最佳<inlier>index.size(),平面});}
}
//为了得到最好的平面,过滤掉所有的点
//在平面以下+拆除地面阈值。
pcl::PointCloud<pcl::PointXYZ>::Ptr云_无_地面_Ptr如果(最佳){云_无_地_ptr=std::使_共享<pcl::PointCloud<pcl::PointXYZ>>()auto inlier_indexs=find_inlieer_index(输入_cloud_ptr,最佳->秒,〔remove_ground_threshold〕(float z)->bool{return z<=remove _ ground thres;})std::无序_集<size _ t>inlier _集(inlier _indexs.begin(),inlier_indexs.end())对于(size_t i_point=0;i_点<input_cloud_ptr->size()i_点++){bool extract_non_ground=true如果((inlier_set.find(i_point)==inlier set.end()==提取_非_地面){constauto&p=(*输入_云_ptr)〔i_点〕云_无_地_ptr>推回(p);}}否则{云_无_地面_ptr=输入_云_ptr;}
返回云_无_地面_ptr
}
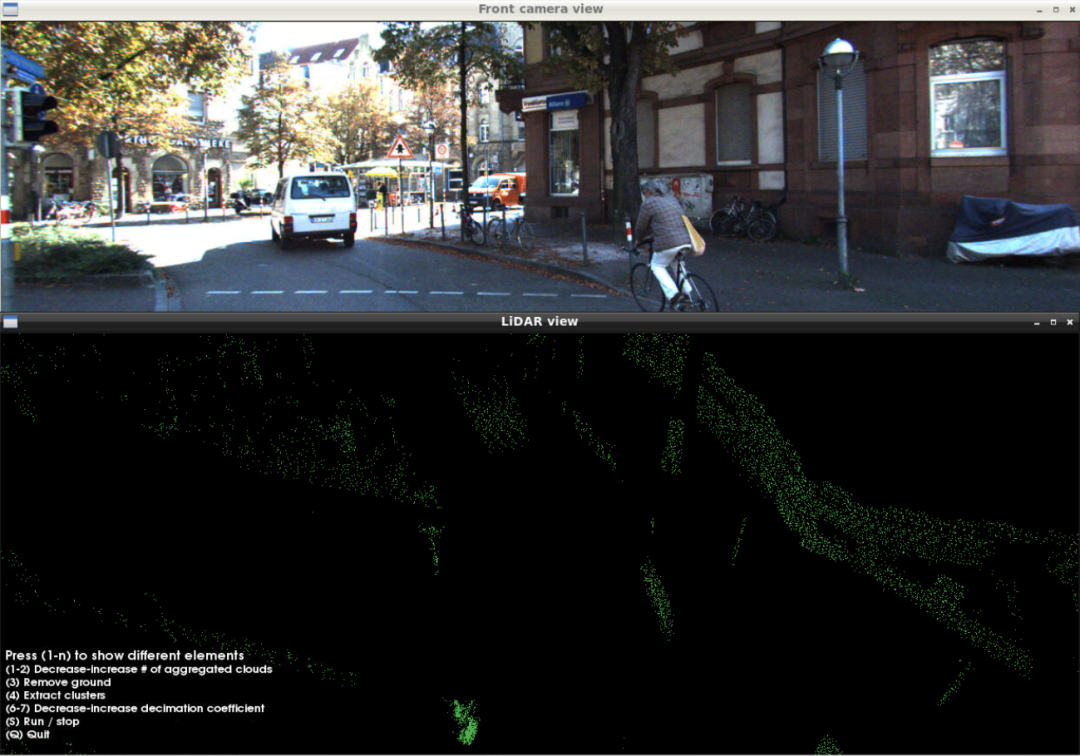
让我们看看地面拆除的结果。
拆除地面前:

地面拆除后:

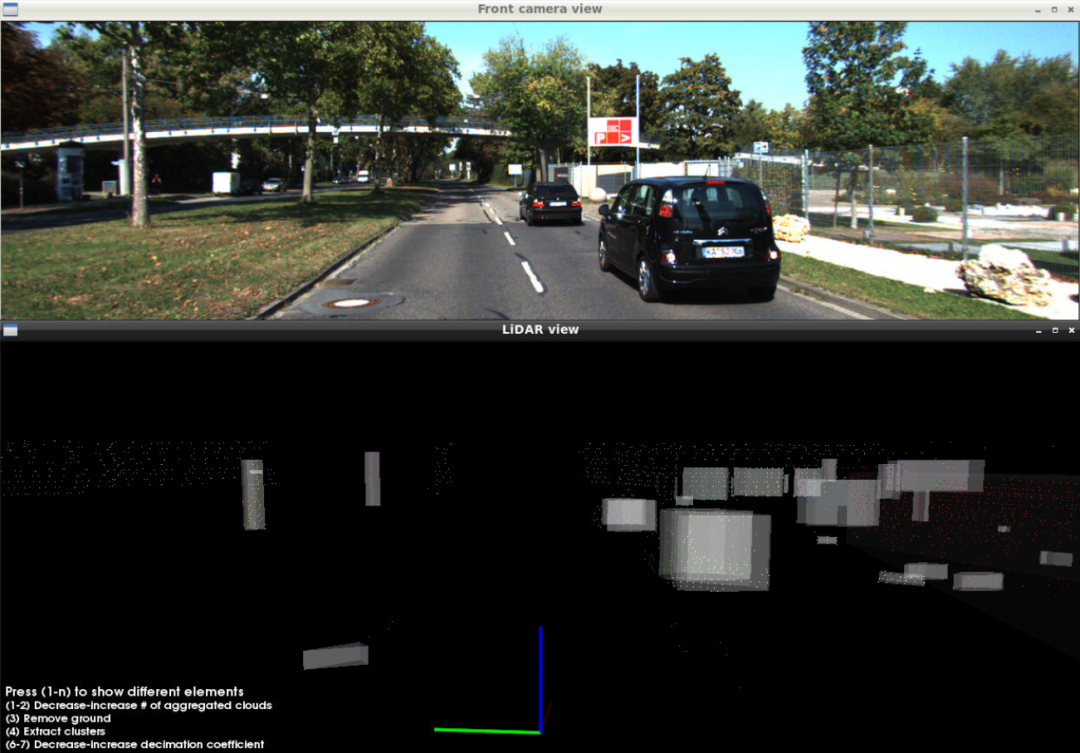
去除地面后,我们准备对剩余的点进行聚类,并通过凸包提取来压缩对象元数据。这两个阶段应该有自己的文章。我将在即将到来的第二部分介绍它们的实现。同时,下面是聚类的最终结果-凸包提取。
可视化最终对象:

凸包绝对是任何跟踪器都渴望接受作为其输入的元数据类型。它们在RAM使用方面更紧凑,比定向边界框更准确地表示对象的边界。
KITTI 0003中的聚类点云:
结论
我相信,就生活质量和整体生产力而言,自动驾驶将是人类的一次飞跃。
参考材料:

谢谢你的阅读!
600学习网 » 自动驾驶:基于PCL的激光雷达感知-600学习网



