
从零开始创建智能机器人 完成您的第一个自定义智能机器人项目全面指导 KKB
800+课程打破常规!
===============课程介绍===============
欢迎参加“从零开始创建智能机器人”的全面指导课程。这门课程将引导您踏上令人兴奋的人工智能和机器人编程之旅,帮助您完成自己的第一个自定义智能机器人项目。无论您是初学者还是有一定编程经验,这门课程都将为您提供全方位的指导,让您能够创建、调试和训练自己的智能机器人助手。
课程亮点:
从零开始学习: 无需先验知识,本课程将从基础知识开始,逐步引导您进入机器人编程的世界。
实际项目指导: 通过完成实际项目,您将亲身体验机器人编程的乐趣,学会创建个性化智能机器人。
多领域涵盖: 本课程将涵盖多个领域,包括机器人运动、语音识别、计算机视觉等,为您打造多功能机器人。
课程内容:
机器人基础: 了解机器人的基本概念和各种类型,选择适合您项目的机器人平台。
机器人编程环境: 掌握机器人编程所需的工具和环境,包括编程语言和集成开发环境。
机器人运动控制: 学习如何控制机器人的运动,包括移动、导航和路径规划。
语音识别与交互: 构建语音识别系统,使机器人能够听懂并响应您的命令。
计算机视觉: 利用计算机视觉技术让机器人识别和理解周围的环境。
机器学习与智能: 引导机器人学习和适应不同场景,使其变得更加智能。
项目实践: 在完成课程的最后,您将能够设计和开发一个完全定制的智能机器人项目。
===============课程目录===============
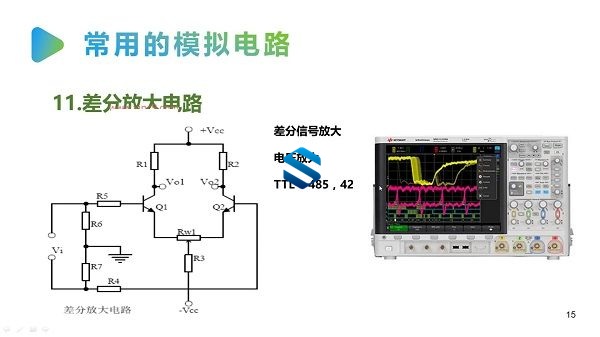
第01章 电路原理及设计
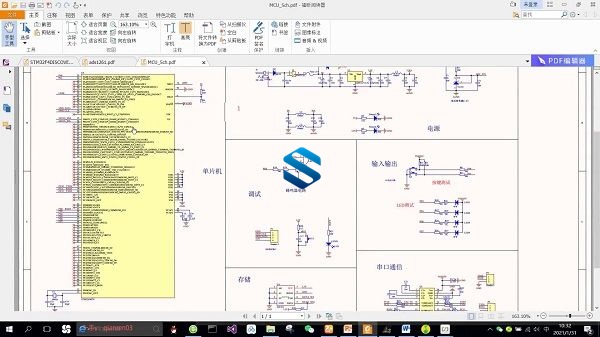
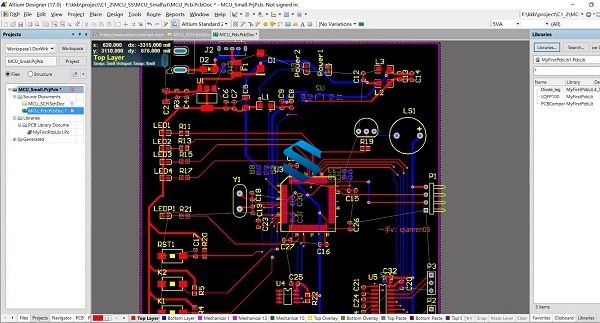
第02章 硬件设计和生产
第03章 计算机硬件体系
第04章 软件介绍
第05章 C语言
第06章 C++
第07章 机器人介绍
第08章 机器人系统设计
第09章 控制器及传感器
第10章 通信
第11章 控制
第12章 SLAM
第13章 图像处理
第14章 机器视觉
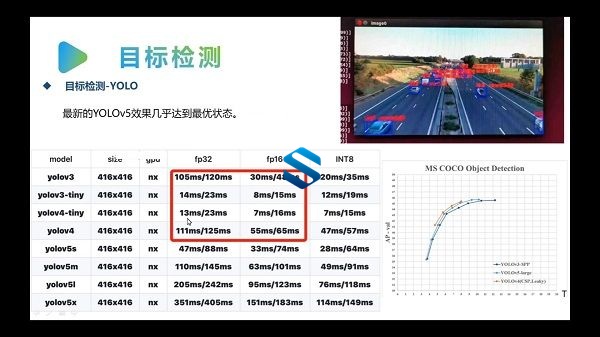
第15章 深度学习
第16章 视觉伺服
第17章 这款智能车底盘的源代码及原理图及硬件讲解-资料
(1)\第01章 电路原理及设计;目录中文件数:6个
├─(3) Multisim教程.doc
├─(4) 安装教程百度网盘链接.doc
├─(5) 机器人1.1-v2(1).pptx
├─(6) 机器人1.1-v2.pdf
├─(7) 机器人公开课kkb2020122817-BP-1230(修改).pptx
├─(8) 第一节课:电路原理及设计.mp4
(2)\第02章 硬件设计和生产;目录中文件数:3个
├─(9) 机器人1.2-v1(1).pptx
├─(10) 机器人1.2-v1.pdf
├─(11) 第二节课:硬件设计与生产.mp4
(3)\第03章 计算机硬件体系;目录中文件数:2个
├─(12) 机器人1.3-v1(1).pptx
├─(13) 第三节课:计算机硬件体系.mp4
(4)\第04章 软件介绍;目录中文件数:3个
├─(14) 机器人2.1-v2 – 副本.pdf
├─(15) 机器人2.1-v2.pptx
├─(16) 第四节课:软件介绍.mp4
(5)\第05章 C语言;目录中文件数:2个
├─(17) 机器人2.2-v2(1).pdf
├─(18) 第五节课:C语言.mp4
(6)\第06章 C++;目录中文件数:2个
├─(19) 机器人2.3-v2.pdf
├─(20) 第六节课:C++.mp4
(7)\第07章 机器人介绍;目录中文件数:2个
├─(21) 机器人3.1.pdf
├─(22) 第七节课:机器人简介.mp4
(8)\第08章 机器人系统设计;目录中文件数:2个
├─(23) 机器人3.2-v1.pdf
├─(24) 第八节课:机器人系统设计.mp4
(9)\第09章 控制器及传感器;目录中文件数:2个
├─(25) 机器人3.3-v2(1).pdf
├─(26) 第九节课:控制器及传感器.mp4
(10)\第10章 通信;目录中文件数:2个
├─(27) 机器人3.4-v2-w1.pdf
├─(28) 第十节课:通信.mp4
(11)\第11章 控制;目录中文件数:2个
├─(29) 机器人3.5-v2.pdf
├─(30) 第十一节课:控制.mp4
(12)\第12章 SLAM;目录中文件数:2个
├─(31) 机器人4.1-v3(1).pdf
├─(32) 第十二节课:SLAM.mp4
(13)\第13章 图像处理;目录中文件数:2个
├─(33) 机器人4.2-v2.pdf
├─(34) 第十三节课:图像处理.mp4
(14)\第14章 机器视觉;目录中文件数:2个
├─(35) 机器人4.3-v2.pdf
├─(36) 第十四节课:机器视觉.mp4
(15)\第15章 深度学习;目录中文件数:2个
├─(37) 机器人4.4-v3.pdf
├─(38) 第十五节课:深度学习.mp4
(16)\第16章 视觉伺服;目录中文件数:2个
├─(39) 机器人4.5-v2.pdf
├─(40) 第十六节课:视觉伺服.mp4
(17)\第17章 这款智能车底盘的源代码及原理图及硬件讲解-资料;目录中文件数:2个
├─(41) Nano系列机器人控制器硬件及源码.zip
├─(42) 开课吧-硬件代码及原理图.zip
600学习网 » 从零开始创建智能机器人 完成您的第一个自定义智能机器人项目全面指导 KKB



